Range Data
The range data used is derived from images where the
data is range or distance rather than intensity.
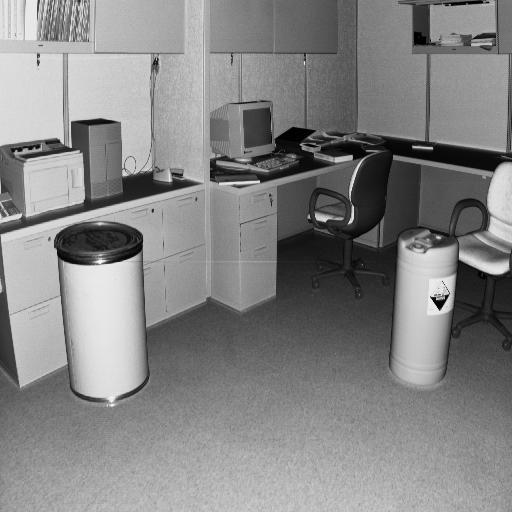
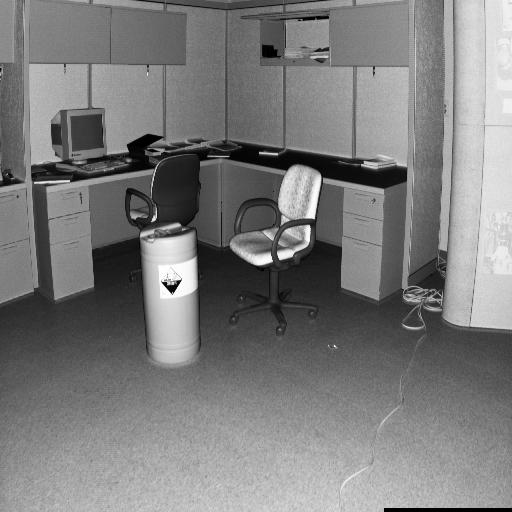
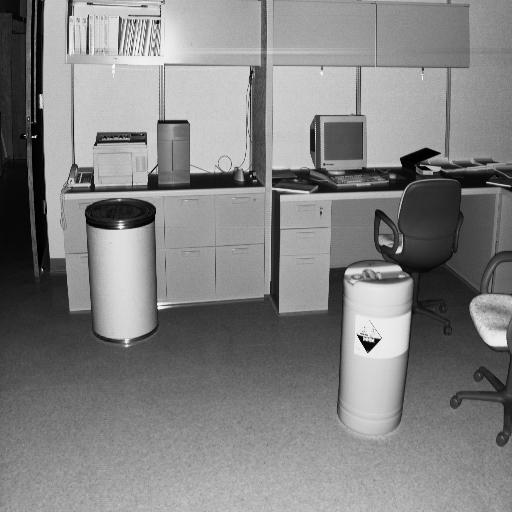
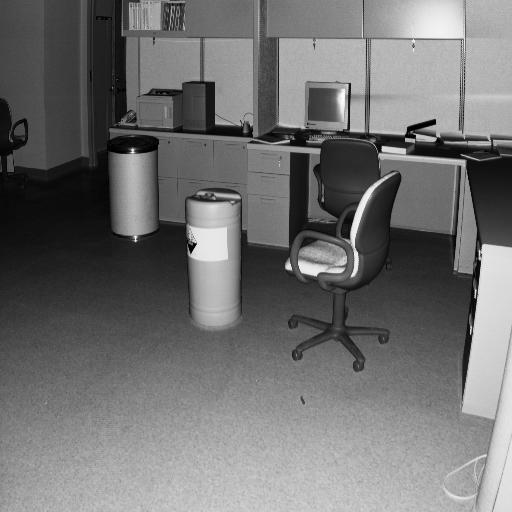

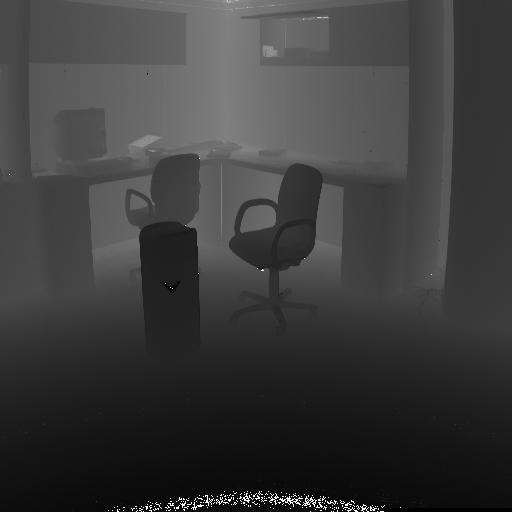


These images show some
typical range data gathered using the Perceptron, with the corresponding
reflectance image above each range scan.
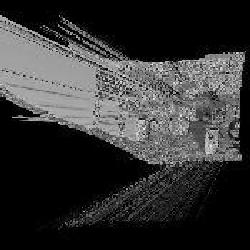
Range image viewed as a surface, note amount of noise.
|
The source of our range data for these results was acquired
using a Perceptron III laser range finder, a time-of-flight laser range finder
better suited to the longer distances encountered in interior and exterior
scenes, rather than capturing smaller objects.
A single range scan by itself is insufficient to model such relatively
large scenes as
a typical room, or perhaps the exterior of a building.
Multiple scans of the scene must be taken from different locations and angles,
then registered so that they overlap correctly.
A methodology must then be developed to handle the inherently complex
surfaces, noisy
data, and large areas associated with such scans.
Volume-based models provide such capability.
Contact amangan@utk.edu