Skuller: A Volumetric Shape Registration Algorithm for Modeling Skull Deformities
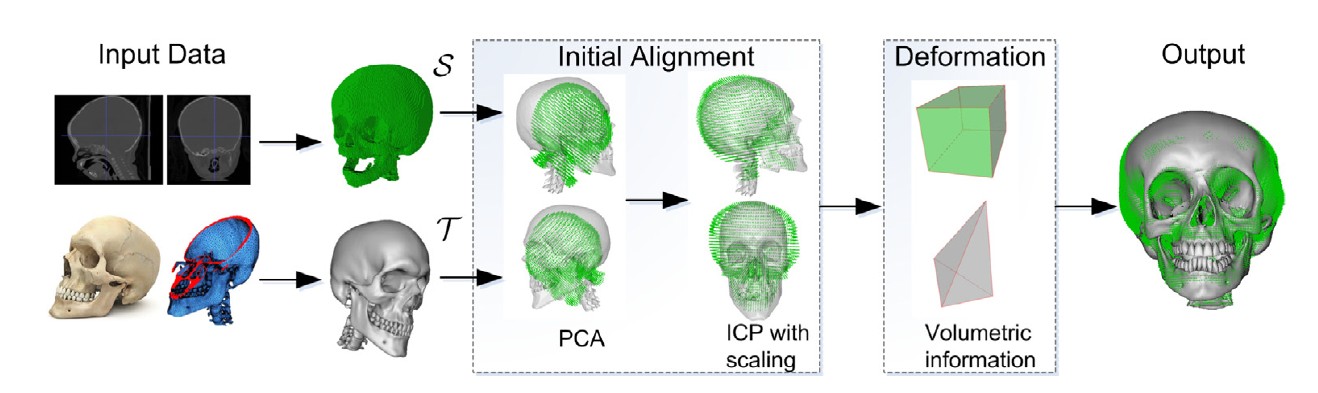 |
AbstractWe present an algorithm for volumetric registration of 3D solid shapes. In comparison to previous work on image based registration, our technique achieves higher efficiency by leveraging a template tetrahedral mesh. In contrast to point- and surface-based registration techniques, our method better captures volumetric nature of the data, such as bone thickness. We apply our algorithm to study pathological skull deformities caused by a particular condition, i.e., craniosynostosis. The input to our system is a pair of volumetric 3D shapes: a tetrahedral mesh and a voxelized object represented by a set of voxel cells segmented from computed tomography (CT) scans. Our general framework first performs a global registration and then launches a novel elastic registration process that uses as much volumetric information as possible while deforming the generic template tetrahedral mesh of a healthy human skull towards the underlying geometry of the voxel cells. Both data are high-resolution and differ by large non-rigid deformations. Our fully-automatic solution is fast and accurate, as compared with the state of the arts from the reconstruction and medical image registration fields. We use the resulting registration to match the ground-truth surfaces extracted from the medical data as well as to quantify the severity of the anatomical deformity. PublicationYusuf Sahillioglu, Ladislav Kavan. Skuller: A Volumetric Shape Registration Algorithm for Modeling Skull Deformities. Medical Image Analysis, 2015. Links and DownloadsAcknowledgementsWe thank Jesse Goldstein for introducing us to the problems of deformed skull shapes due to craniosynostosis. We also thank Alec Jacobson for help with tetrahedral meshing and Y. Ou, A. Sotiras, and S. Pszczolkowski for running the original softwares of the algorithms Ou et al. (2011) and Rueckert et al. (1999), respectively. This research was supported by TUBITAK 2219 Award and NSF CAREER Award IIS-1350330. |