Rigid Body Collision Response
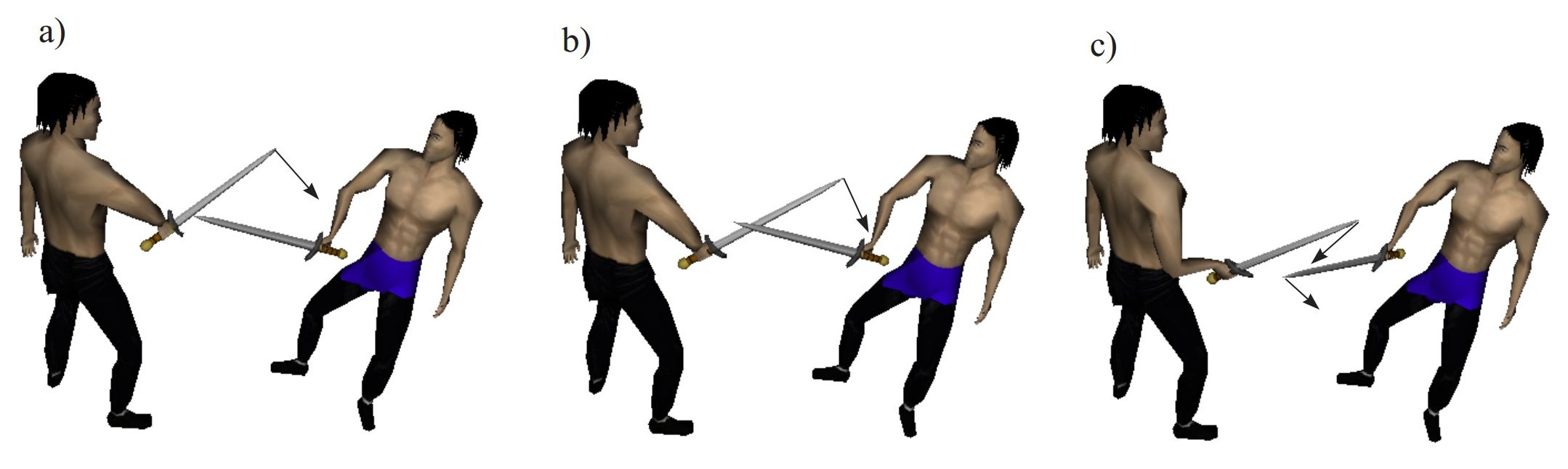 |
Application: Fencing in Virtual Reality. a) weapons before collision, b) state in the time of contact, c) post-collision movement
AbstractIn many virtual reality applications it is necessary to simulate the interaction among solid objects. One of the basic requirements is to ensure a non-penetration of rigid bodies. We show algorithms for detecting a collision of moving bodies along with the exact time of collision determination. Next we present a method for computation the post-collision velocities and positions of colliding objects. In our approach we exploit the laws of classical mechanics, however the physical accuracy is not the goal. We sacrifice the accuracy in exchange for simple and real-time algorithms. PublicationLadislav Kavan. Rigid Body Collision Response. 7th Central European Seminar on Computer Graphics, 2003. Links and Downloads
|
