Locomotion Interfaces
 Locomotion interfaces are energy-extractive devices that, in a
confined space, simulate unrestrained human mobility such as walking
and running for virtual reality. Locomotion interfaces overcome
limitations of using joysticks for maneuvering or whole-body motion
platforms, in which the user is seated and does not expend energy, and
of room environments, where only short distances can be traversed.
Their use yields realistic navigation and engagement in modeled worlds
and an enhanced sense of spatial layout.
Locomotion interfaces are energy-extractive devices that, in a
confined space, simulate unrestrained human mobility such as walking
and running for virtual reality. Locomotion interfaces overcome
limitations of using joysticks for maneuvering or whole-body motion
platforms, in which the user is seated and does not expend energy, and
of room environments, where only short distances can be traversed.
Their use yields realistic navigation and engagement in modeled worlds
and an enhanced sense of spatial layout.Our experimental platform is the Sarcos Treadport, a unique locomotion interface that comprises a large tilting treadmill, an active mechanical tether, and a CAVE-like visual display. Highly interdisciplinary teams of investigators seek to make the locomotion experience as realistic as possible. Of its hypothetical uses, rehabilitation applications are actively being researched. Locomotion display is the presentation of mechanical stimuli to simulate the various aspects of natural locomotion. Our research focuses on the use of the Sarcos Treadport's active mechanical tether to achieve a variety of locomotion aspects.
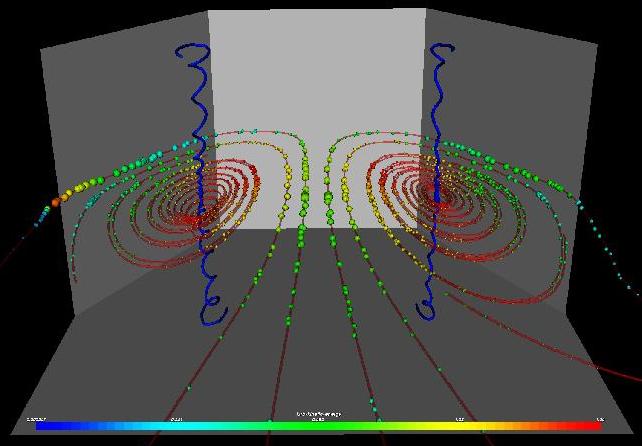 It has been argued that a totality of sensory effects, mutually
reinforcing, is required for immersion, otherwise a missing sense will
veto the immersive experience. A significant aspect missing from
virtual environments is atmospheric display, particularly wind and
smell. The Treadport Active Wind Tunnel (TPAWT pronounced teapot)
project is the first to attempt to build a three-dimensional wind
tunnel within the Treadport confines, in order to generate controlled
wind from any direction on the user.
It has been argued that a totality of sensory effects, mutually
reinforcing, is required for immersion, otherwise a missing sense will
veto the immersive experience. A significant aspect missing from
virtual environments is atmospheric display, particularly wind and
smell. The Treadport Active Wind Tunnel (TPAWT pronounced teapot)
project is the first to attempt to build a three-dimensional wind
tunnel within the Treadport confines, in order to generate controlled
wind from any direction on the user.
Rehabilitation Applications
One way of looking at the Treadport Locomotion Interface is as a realistic simulation of real-world walking in a safe environment. Two potential applications in rehabilitation are being pursued: incomplete spinal cord injuries and Parkinsons disease, sponsored by the following NSF grants.-
NRI-Small: Robotic Treadmill Therapy for Lower Spinal Cord
Injuries
Award Number:1208637; Principal Investigator:John Hollerbach; Co-Principal Investigator:Jake Abbott; Organization:University of Utah;NSF Organization:IIS Start Date:09/01/2012; Award Amount:$916,999.00.
-
HCC: Medium: Collaborative Research: Haptic Display of Terrain
Characteristics and its Application in Virtual and Physical
Worlds.
Award Number:1162617; Principal Investigator:Mark Minor; Co-Principal Investigator:John Hollerbach, Andrew Merryweather, Kenneth Foreman; Organization:University of Utah;NSF Organization:IIS Start Date:10/01/2012; Award Amount:$1,100,554.00.