Measuring Fingertip Force by Imaging the Fingernail
The goal of this project is to measure fingertip forces by using a
multi-camera system to image coloration changes in the fingernail
and surrounding skin. Key advantages of this transduction method
are that objects do not have to be instrumented with force sensors,
and relatively unconstrained grasps can be measured.
Grasping studies to date have required the design of special test
objects using key-like touch pads instrumented with force sensors,
but the new technique now allows the characterization of grasp forces
for ordinary objects of arbitrary shape. It also allows the
measurement of fingertip forces when regrasping and manipulating
objects, where the contact points change in an unpredetermined manner.
Key steps are the following.
2D to 3D Image Registration [Haptics06] [CVPR07][TBME08]
 Fingernail locations will vary depending on the grasp and on the
relative locations of the cameras. As a particular fingernail is
imaged, it will be necessary to correspond points in the image to
a reference image so that calibration results can be applied.
Fingernail locations will vary depending on the grasp and on the
relative locations of the cameras. As a particular fingernail is
imaged, it will be necessary to correspond points in the image to
a reference image so that calibration results can be applied.
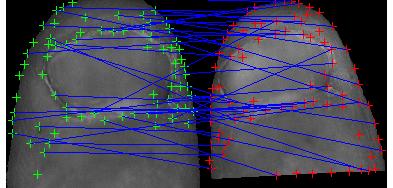
 Fingernails are curved, so the analysis of the coloration changes has
to be carried out in 3D. Currently there are many registration
methods relying on naturally present features, such as edges, corners
or texture. However, the fingernail is relative featureless and some
features, related to color, change with force. Pairing of those
features with neighborhood correlation gives a great number of
outliers (wrong pairs). We currently use RANSAC to find the inlier
pairs and use those pairs to calculate the tranform matrix. The 3D
model of the fingernail is obtained with a Bumblebee Stereo camera from
Point Grey Research.
Fingernails are curved, so the analysis of the coloration changes has
to be carried out in 3D. Currently there are many registration
methods relying on naturally present features, such as edges, corners
or texture. However, the fingernail is relative featureless and some
features, related to color, change with force. Pairing of those
features with neighborhood correlation gives a great number of
outliers (wrong pairs). We currently use RANSAC to find the inlier
pairs and use those pairs to calculate the tranform matrix. The 3D
model of the fingernail is obtained with a Bumblebee Stereo camera from
Point Grey Research.

|
 |
 |
| Bunblebee (Point Grey) |
Flea (Point Grey) |
Lens (Tomron) |
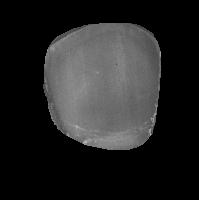
Elastic Warping [TRO09][WHC07][CVPR07]
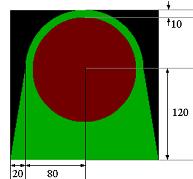 To compare fingernails from different subjects, finger images are
registered to a finger atlas with simplified reference shapes. The
fingernail is modeled as a disk with 70 pixel radius. The surrounding
skin region is composed of a ring and an isosceles trapezoid.
Ideally, the fingernails are mapped to the fingernail atlas, and the
surrounding skin is mapped to the surrounding skin atlas. To do so,
the fingernails in the reference images need to be segmented from the
surrounding skin.
To compare fingernails from different subjects, finger images are
registered to a finger atlas with simplified reference shapes. The
fingernail is modeled as a disk with 70 pixel radius. The surrounding
skin region is composed of a ring and an isosceles trapezoid.
Ideally, the fingernails are mapped to the fingernail atlas, and the
surrounding skin is mapped to the surrounding skin atlas. To do so,
the fingernails in the reference images need to be segmented from the
surrounding skin.
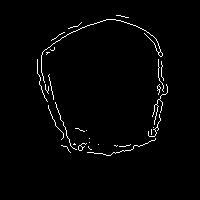
We use a Canny edge filter to automatically detect the boundary of
the fingernail. However, because of the broken skin around the
fingernail, the automatically detected boundary is noisy and can
rarely form a smooth curve. We use cubic B-splines to fit the edges
and achieve a close-loop contour. The region inside of the contour is
the segmented nail.

|
|

|
 |
|
| A finger |
Canny edge |
Bspline |
Boundary |
Segmented nail |
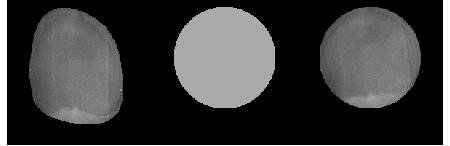
The nail and the surrounding skin are transformed to the atlas
image with boundary-based elastic deformation transformation. We
model both the fingernail and surrounding skin regions as elastic
sheets that are warped by an external force field applied to the
boundaries. Since elastic warping tends to preserve color pattern
shapes and the relative position of the patterns, it suits color
pattern comparison across subjects.
|
 |
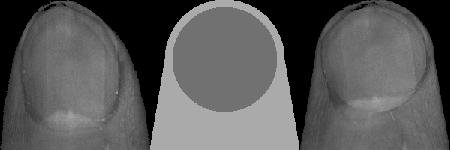 |
| Elastic nail warping |
Elastic skin warping |
Combination |
Weighted Least Squares Model [Haptics06][TBME08]
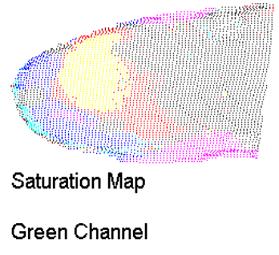 Our research has identified that certain areas of the fingernail
show a strong linear response of coloration to fingertip force,
others do not. Not just the fingernail areas show this effect,
certain areas of the surrounding skin particularly at the base
of the nail show a strong linear response as well. The location
of the good areas depends on the contact conditions.
Our research has identified that certain areas of the fingernail
show a strong linear response of coloration to fingertip force,
others do not. Not just the fingernail areas show this effect,
certain areas of the surrounding skin particularly at the base
of the nail show a strong linear response as well. The location
of the good areas depends on the contact conditions.
Generally speaking, regions within the fingernail saturate at
lower force levels than regions in the surrounding skin. The
front of the fingernail saturates at higher force levels than
the middle of the fingernail. The skin at the sides of the
fingernail saturates at the highest force levels. The relatively
low saturation level of the middle of the fingernail emphasizes
the need to image the whole fingernail and surrounding skin.
Using the good mesh elements, a generalized least squares
estimator is applied to predict fingertip force.
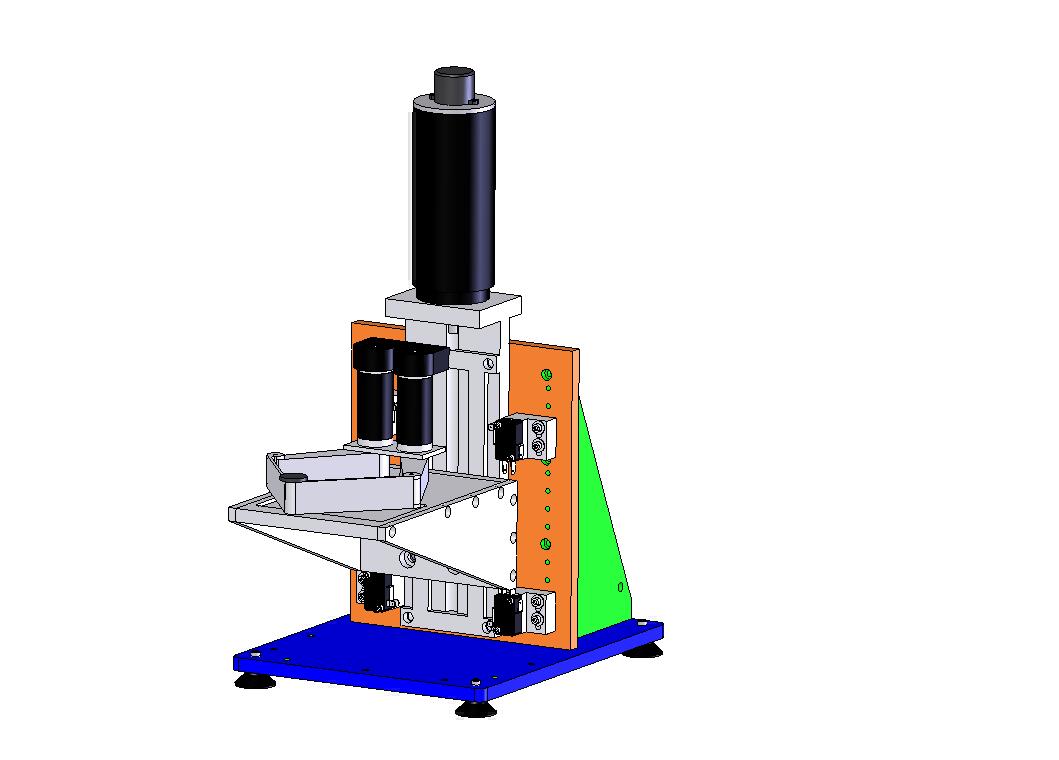
Automated Calibration [WHC09][Haptics10]
To improve our calibration procedure, we are developing a robot that will
apply forces in three directions independently. The z-direction force is
supplied by a single motor with a linear stage, on which a
platform is mounted. A two-DOF pantograph is attached to the platform, on
which is mounted a six-axis force sensor. The fingertip rests against the
force sensor, while the first and second links of the finger are held in
place by a small finger brace. A series of force controllers determine
the input signals to each of the three motors. With this design, the test
subject can hold the finger still while the machine provides the desired
force, allowing for more methodical collection of calibration data.

Participants
Collaborators
Yu Sun, University of South Florida
Martha Flanders, University of Minnesota
John F. Soechting, University of Minnesota
This project was supported by NIH Grant 1R21EB004600-01A2.
Publications
| Haptics10 |
Grieve, T., Lincoln, L., Sun, Y., Hollerbach, J.M., and Mascaro, S.A.,
``3D force prediction using fingernail imaging with automated
calibration,'' Haptics Symposium, March 25-26, 2010,
Waltham, MA, pp. 113-120.
|
| WHC09 |
Grieve, T., Sun, Y., Hollerbach, J.M., and Mascaro, S.A.,
``3-D force control on the human fingerpad using a magnetic levitation
device for fingernail image calibration,'' World Haptics
Conference, March 18-20, 2009, pp. 411-416.
|
| TRO09 |
Sun, Y., Hollerbach, J.M., and Mascaro, S.A.,
``Estimation of finger force direction with
computer vision,'' IEEE Trans. Robotics, 25, 2009,
pp. 1356-1369.
|
| TBME08 |
Sun, Y., Hollerbach, J.M., and Mascaro, S.A.,
"
Predicting fingertip forces by imaging coloration changes in the
fingernail and surrounding skin," IEEE Trans. Biomedical
Engineering, 55, 2008, pp. 2363-2371.
|
| CVPR07 |
Sun, Y., Hollerbach, J.M., and Mascaro, S.A.,
"Imaging the finger force direction,"
IEEE Computer Society Conference on Computer Vision and Pattern
Recognition, June 18-23, 2007, Minneapolis, MN.
|
| ICRA07 |
Sun, Y., Hollerbach, J.M., and Mascaro, S.A.,
"EigenNail for finger force direction recognition,"
Proc. IEEE Intl. Conf. Robotics and Automation, April 10-14,
2007, Rome, Italy, pp. 497-502.
|
| WHC07 |
Sun, Y., Hollerbach, J.M., and Mascaro, S.A.,
"Finger force direction recognition by principal component analysis of
fingernail coloration pattern,"
Proc. World Haptics Conference, March 22-24, 2007, Tsukuba,
Japan, pp. 243-248.
|
| ICRA06 |
Sun, Y., Hollerbach, J.M., and Mascaro, S.A.,
"Features and prediction model for imaging the fingernail to measure
fingertip forces,"
Proc. IEEE Intl. Conf. Robotics and Automation, May 15-19,
2006, Orlando, FL, pp. 2813-2818.
|
| Haptics06 |
Sun, Y., Hollerbach, J.M., and Mascaro, S.A.,
"Measuring fingertip forces by imaging the fingernail,"
Proc. 14th Symposium on Haptic Interfaces for Virtual Environment
and Teleoperator Systems, pp. 757-762, 2006.
|
Videos
- Manual control box of a PUMA robot simulated by fingernail imaging
[wmv]. This video shows finger
tracking by a camera, and detection of "intent to click" by color
changes in the fingernail.
- 2D control of a mouse in a simulated object capture game
[wmv]. This video demonstrates
the ability to detect fingertip force direction.
|
